Hai guys, kali ini kita mau bahas tentang magnetorquer dan reaction wheel nih. Pernah kepikiran ngga kenapa satelit bisa mempertahankan posisinya? Pasti ada sesuatu tuh, yuk simak penjelasan kita..
Oke pertama-tama tuh kalian harus tau secara umum dalam komunikasi satelit dibagi menjadi 2 bagian yaitu pada bagian space segment dan ground segment. Pada bagian space segment terdapat subsistem-subsistem pembangun untuk komunikasi satelit diantaranya RF (radio frequency), EPS (electric power system), ADCS (attitude determine and control system), OBDH (on board data handling). Subsistem ADCS sangat diperlukan karena fungsi dari ADCS adalah untuk menentukan pergerakan dan mengontrol sikap dari satelit agar satelit tetap berorientasi pada orbitnya.
ADCS memiliki peran penting dalam menentukan pergerakan dan mengontrol sikap satelit di orbitnya. Menurut de Weck dari Department of Aeronautics and Astronautics, Massachusetts Institute of Technology pada 2001 bahwa istilah-istilah dalam sistem ADCS meliputi:
- Attitude atau sikap satelit adalah orientasi sistem koordinat satelit terhadap referensi eksternal (misal terhadap Bumi).
- Attitude Determination adalah pengetahuan terhadap sikap satelit terhadap toleransi yang diberikan baik secara waktu nyata (real-time), maupun non real-time.
- Attitude Control adalah pengendalian sikap satelit yang diinginkan dengan toleransi tertentu yang diberikan. Jadi dapat disimpulkan bahwa sistem ADCS satelit adalah sistem yang berfungsi untuk mengetahui orientasi sikap satelit dan selanjutnya dilakukan pengendalian satelit berdasarkan sikap tersebut.
ADCS memiliki dua fungsi utama yaitu ADS (attitude determine system) dan ACS (attitude control system) yang dimana:
- ADS adalah sistem untuk mengobservasi dalam menentukan dan mengubah titik observasi tersebut menjadi sebuah sinyal yang akan diproses oleh controller. ADS ini berupa sensor, contoh sensor yang biasa digunakan antara lain sensor bumi, sensor matahari, sensor bintang, magnetometer, rate gyros, GPS receiver, magnetic field sensor, dll.
- ACS adalah sistem untuk mengerakkan atau mengontrol sikap satelit yang sudah diproses di sistem ADS untuk dieksekusi. ACS berupa Aktuator. Aktuator atau penggerak satelit berfungsi untuk menggerakkan satelit relatif terhadap sumbunya (rotasi) dan terbagi lagi menjadi Aktuator Pasif dan Aktuator Aktif.
Nah, contoh dari Aktuator Aktif adalah Magnetorque dan Reaction Wheel. Ini nih yang bisa bikin satelit mempertahankan kedudukannya, yuk simak ya..
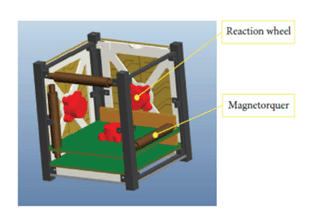
MAGNETORQUER
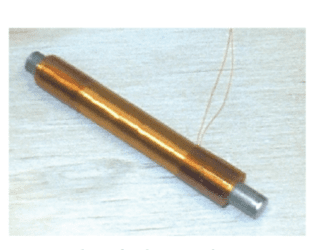
Kepo gak sama si batang emas ini? Ini adalah magnetic torquer yang berupa lilitan kawat dengan inti udara di mana coil ini berfungsi untuk membangkitkan dipol momen magnetik. Prinsip kerja coil magnetik sebagai berikut: lilitan kawat diberi arus listrik, maka dalam sirkuit tertutup (loop) timbul medan magnet, lalu vektor medan magnet tersebut akan berusaha mengarah ke medan magnet Bumi. Interaksi antara vektor medan magnet coil magnetik tersebut dengan medan magnet bumi akan menghasilkan torsi magnetik. Pada satelit, torsi magnetik itulah yang menyebabkan satelit berotasi.
Perhitungan torsi dapat ditentukan dengan persamaan:
Dimana:
T: torsi yang diinginkan dari satelit nano (Joule)
µ: momen magnetik yang berinterkasi dengan medan magnet bumi untuk menghasilkan torsi pada nanosatelit (Joule/Tesla)
B: medan magnet bumi yang dihasilkan dari bumi (Tesla).
Magnetorquers ringan, andal, dan hemat energi. Tidak seperti propeller , mereka juga tidak membutuhkan propelan yang dapat dibuang , sehingga mereka secara teori dapat bekerja tanpa batas waktu selama daya yang cukup tersedia untuk mencocokkan dengan beban resistif gulungan. Di orbit Bumi, sinar matahari adalah salah satu sumber energi yang praktis tak habis-habisnya, menggunakan panel surya. Keuntungan lebih lanjut atas roda momentum dan giroskop momen kontrol adalah tidak adanya bagian yang bergerak dan karenanya keandalannya secara signifikan lebih tinggi.
Kerugian utama dari magnetorquers adalah bahwa kepadatan fluks magnet yang sangat tinggi diperlukan jika kerajinan besar harus diputar sangat cepat. Torsi yang disediakan juga sangat terbatas dan hanya berfungsi untuk mempercepat atau memperlambat perubahan sikap pesawat ruang angkasa dalam hitungan menit, tetapi untuk kontrol sikap dan stabilisasi yang akurat, torsi yang diberikan seringkali tidaklah cukup.
REACTION WHEELS
Reaction wheel adalah salah satu komponen satelit yang berfungsi sebagai akuator yang digunakan untuk pengontrolan sikap (attitude control) satelit akibat dari gangguan torsi. Ini merupakan salah satu dari contoh aktuator aktif.
Prinsip kerja dari Reaction Wheel adalah untuk menghasilkan torsi angular akibat putaran roda yang dihasilkannya, di mana torsi yang dihasilkan akan membangkitkan momentum angular. Selanjutnya momentum angular yang dibangkitkan tersebut akan ditransfer oleh satelit sesuai dengan hukum kekekalan momentum. Proses transfer momentum angular inilah sebenarnya yang membuat satelit mengalami rotasi.

Bentuk fisis reaction wheel adalah sebuah roda yang berbentuk silinder yang berputar pada porosnya (gambar 3) yang digerakkan oleh sebuah motor, untuk menimbukan torsi. Motor digerakan oleh energi listrik dari sub system power satelit.
agar dapat berfungsi, Reaction Wheel memiliki 3 komponen penting yaitu:
1. Motor DC brushless (BLDC), berfungsi sebagai penghasil kecepatan putar dan torsi pada flywheel untuk bisa menggerakan posisi satelit.
2. Electronik Speed Control (ESC), berfungsi sebagai pengatur kecepatan yang dihasilkan oleh motor DC brushless.
3. Flywheel berfungsi sebagai penyimpan dan penghasil momentum sudut.
Reaction Wheel biasanya digunkanan untuk satelit berukuran lebih dari mikro, karena membutuhkan space yang besar, reaction wheel juga memakan daya yang sangat besar.
Reaction wheel bergerak pada 3 sumbu yaitu:
- Sumbu X yang akan menjadi sudut Roll atau mengarah pada pergerakan orbit satelit.
- Sumbu Y yang akan menjadi sudut Pitch atau mengarah pada keseimbangan sistem satelit,
- Sumbu Z yang akan menjadi sudut Yaw.
Nah segitu dulu penjelasan dari kami tim magang ADCS, dah~
– I Made Agus Dwipayana –
– Aipujana Tiara Santoso –
– Lita Kurnia Fitriyanti –
Referensi:
- Haryadi, D. R. (2016). Perancangan Dan Realisasi Sistem Gerak Aktif Satelit – Nano Berbasis Saluran Mikrostrip
- Oktodwilavito, M. B. (2018). Purwarupa Muatan Pengontrol Sikap Satelit Nano Berbentuk Kubus Menggunakan.
- Rasyidin, Z. (n.d.). Dinamika Roda Pejal Torsi (Reaction Wheel) Sebagai Kontrol Sikap Satelit Mikro.
- Steyn, P. W. (n.d.). Magnetic Attitude Determination and Control for Low Earth.
- Syariffudin, M. A. (n.d.). Sistem Attitude Determination And Control (ADCS) Satelit LAPAN-A2/ORARI .
- https://wiki.stanfordssi.org/Attitude_Determination_and_Control_(ADCS)
- https://www.futek.com/application/torque-sensor/Satellite-Reaction-Wheel-Torque